
Wylatałem ok. 5 pakietów po raz pierwszy w trybie Acro na standardowych ustawieniach BetaFlight, przy okazji robiąc kilka koślawych akrobacji takich jak beczki ("roll") lub "fikołki" zwane "flip'ami". Od razu zacząłem odczuwać zbyt małe prędkości obrotów wokół osi Roll oraz Pitch. Wykonanie takich manewrów na małej wysokości z małą prędkością obrotu z oczywistych względów jest niebezpieczne, bo zanim wyjdziemy z manewru to może być już za późno... Zacząłem zatem kombinować jak przyspieszyć wykonywanie tych elementów lotu póki co bez PID'owania, na którym się nie znam. Okazuje się, że z pomocą ustawień aparatury + ustawień Rates w BF można bardzo prosto to osiągnąć.
RATES w BetaFlight modyfikuje się w zakładce PID Tuning. Po przejściu do tabelki trzy pierwsze tabelki to właśnie PID'y (Proportional, Integral, Derivative), trzy ostatnie to Rates (RC Rate, Super Rate i RC Expo). Zostawmy na razie PID'y w spokoju ;)
Modyfikacja RATES
Do dyspozycji mamy trzy zmienne:- RC Rate
- Super Rate
- RC Expo
Najprościej (zalecane) zacząć od modyfikacji RC Rate.
RC Rate
Generalnie wszystkie wartości Rate zmieniają wartość prędkości obrotów w osiach Roll/Pitch/Yaw podczas wychylania drążka. Jeśli wartości Super Rate są ustawione na 0 to zauważymy, że zmiany RC Rate są całkowicie liniowe (wykresem jest linia prosta, która zmienia wraz ze zmianą RC Rate, swoje punkty maksymalne, czyli prędkość obrotu przy wychyleniach drążków).
Ustawienia RC Rate są wspólne dla ROLL i PITCH oraz osobne dla YAW. RC Rate zmienia się od 0.00 do 2.55.
 |
| Ustawienia dla RC Rate = 1.00 |
 |
| Maksymalne wartości RC Rate = 2.55 (maksymalna wartość) |
Super Rate
Jak łatwo zauważyć zmiany Super Rate wpływają na maksymalne prędkości obrotów w ich końcowej fazie. Ustawiony RC Rate z zerowymi Super Rate będzię liniowy, natomiast zmiana Super Rate na wartość większą od 0 spowoduje iż wykres "odchyla" się od liniowego w stronę wykładniczego.
Przykładowa modyfikacja Super Rate (już osobno dla wszystkich osi R/P/Y) przy zachowanym RC Rate = 1.0 - Super Rate Roll = 0.5, Super Rate Pitch = 0.33, Super Rate Yaw = 0.00. Jak widać Super Rate Roll zmieniło wartość maksymalną prędkości obrotu do 400 stopni na sekundę w osi Roll, z kolei Super Rate Pitch = 0.33 zmienił wartość pochyłu/odchyłu w osi Pitch do 299 stopni / sekundę.
 |
| RC Rate = 1.0; Super Rate Roll = 0.5, Super Rate Pitch = 0.33, Super Rate Yaw = 0.00 |
RC Expo
Co zatem robi ostatnia funkcja RC Expo? Obrazowo mówiąc: w środku układu współrzędnych (gdy drążek jest blisko pozycji centralnej) wykres ulega wypłaszczeniu z powrotem do funkcji liniowej natomiast im dalej zwiększają się wartości na osi X (wychylenie drążka) tym wartość funkcji zwiększa się jeszcze szybciej (podstawa funkcji wykładniczej rośnie). Mówiąc wprost: im drążek będzie bliżej swoich skrajnych wychyleń tym zmiana wartości prędkości obrotu będzie znacząco większa.
RC Expo zmienia wartości od 0.00 do 1.00, w przypadku 1.00 dla osi Roll wygląda to tak (jednocześnie RC Rate Roll = 1.00, Super Rate Roll = 1.00 żeby było widać różnicę):
Jak to można zinterpretować powyższy wykres dla osi ROLL? Mniej więcej w ten sposób, że przez 4/5 długości wychylenia drążka totalnie nic się nie będzie działo, a na ostatnim odcinku blisko skrajnego wychylenia nagle dron może nam zrobić obrót prawie 2000 stopni na sekundę ;). Lepiej zatem nie stosować takich ustawień, bo ich zastosowanie praktyczne jest raczej małe...
Zacznij od sprawdzenia obecnego zakresu gazu
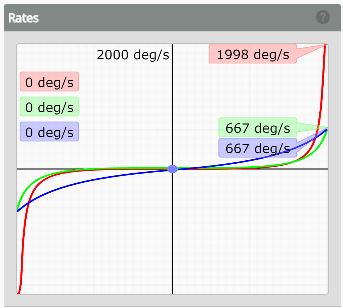
Oczywiście ustawienia w BetaFlight można zmieniać przy podłączonym kontrolerze przez USB do komputera, bez konieczności podłączania lipol'a, ale wtedy nie zauważymy jednej ważnej rzeczy - obecnego zakresu w jakim pracuje nasz drążek gazu - może się okazać, że nie jest to pełny zakres widoczny na wykresie.Dlatego należy zdjąć śmigła, podpiąć zasilanie z lipo i sprawdzić w jakim zakresie na osi X wykresu Rates pracuje nasz drążek gazu. U mnie to wyglądało na początku tak:


Jak widać - mimo, iż maksymalne wychylenia na wykresie (w skrajnych pozycjach) pozwalają na obrót drona wokół wszystkich osi (ROLL/PITCH/YAW) z prędkością 667 stopni na sekundę - zakres ruchu drążków we wszystkich trzech osiach w moim przypadku pozwala jedynie na -208 i 206 stopni na sekundę.
Ma to też odzwierciedlenie w zakładce Receiver w BetaFlight - o ile gaz działa w przedziale 1000 i 2000 ze środkiem 1500, tak Roll/Pitch/Yaw działa jedynie w przedziale <1199,1799> ze środkiem w 1499-1500.


Na logikę zatem - rozszerzenie tego przedziału dam nam możliwość operowania drążkiem w szerszym zakresie. Żeby to zrobić najłatwiej i bez ingerencji w samo Rates postanowiłem zmienić położenie punktów końcowych wychyleń drążków prosto z aparatury poprzez modyfikację End Point'ów. W moim przypadku (aparatura Hitec Aurora 9) End Pointy są modyfikowane poprzez procentowe ich przesunięcie w górę i w dół. Zmodyfikowałem wstępnie tylko AILE (oś Roll) i ELEV (oś Pitch) do maksymalnych wartości +/- 140% (standardowo 100%).
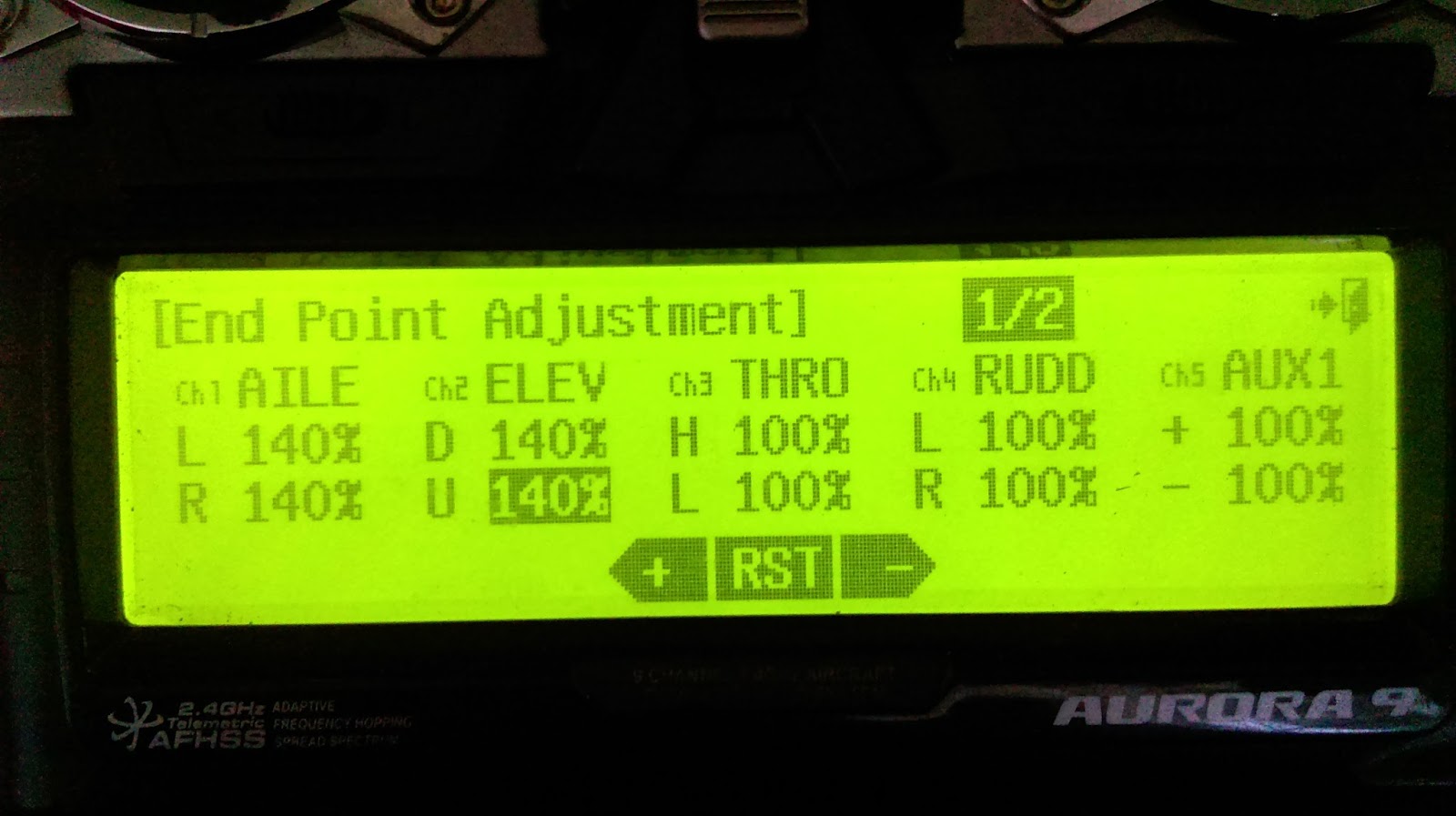
Ta modyfikacja pozwoliła na zwiększenie wychyleń do obrotów ponad 400 stopni na sekundę w obu osiach (ROLL i PITCH).




Modyfikacja jest widoczna również w zakładce Receiver w BetaFlight: np. zakres działania ROLL zmienił się od 1079 do 1919,


To była pierwsza istotna zmiana, której dokonałem po odbyciu kilku lotów na standardowych ustawieniach. Początkowy obrót w osi Roll/Pitch pozwalał na beczki i flipy z prędkością 200 stopni na sekundę i to było mocno odczuwalne - obrót trwał powyżej sekundy, a to na niskiej wysokości było niezbyt bezpieczne, choć na szczęście nie rozbiłem quada. Po dwukrotnym przyspieszeniu obrotu do 400 stopni na sekundę w końcu beczki/flipy w końcu są szybsze. Teraz można zacząć bawić się dalszymi modyfikacjami Rates poprzez wprowadzanie zmian RC Rate, Super Rate i RC Expo natomiast tutaj zalecam już samodzielne eksperymentowanie - wszystko zależy od tego w jakim zakresie wychyleń drążków chcecie poruszać się w miare przewidywalnie i bezpiecznie (należy utrzymać wykres liniowy blisko środka), a przy jakich wychyleniach (przeważnie bliskie maksymalnym) chcecie mieć nagły skok prędkości obrotów by wykonywać szybsze akrobacje (wykres przechodzi w wykładniczy). Powodzenia!






Powitać.
OdpowiedzUsuńCo teraz jest warte uwagi? Chodzi o kontroler lotu. Mam apm 2.6. Padł mi regulator i muszę go czymś zastąpić. Postanowiłem wymienić cały komplet i zamontować coś z zakresu 3-6s 35A, tak na zapas i przyszłościowo. Ale większość regulatorów jest na sofcie blheli. Z tego co się dowiedziałem blheli nie działa z apm. Chyba, że jakaś starsza wersja blheli zatrybi. Natomiast simonk działa, ale chyba już nie jest rozwijany, bo strasznie mało jest regulatorów z nim. Pytanie, czy warto się pchać w simonk (kupić gotowe regle, albo programować), czy lepiej sobie odpuścić? Mam już regulatory na oku, ale pasowałoby też wymienić kontroler lotu dla nich. Już się z tym pogodziłem i apm się pozbędę, albo zbuduję jakiś inny pojazd na nim. Tu kolejne pytanie. Jaki kontroler lotu będzie dobry dla quadkoptera 650? Pasowałyby mi funkcje zbliżone do apm, tzn wspomaganie barometrem i gpsem (trzymanie pozycji, trzymanie wysokości, powrót na start, lot po ustalonych punktach). Nie wiem kompletnie co teraz jest na rynku, a soft betaflight chyba nie jest najlepszy dla dużych maszyn, i nie można z nim używać gpsa i baro. Wpadł mi w oko gdzieś na forum jakiś wpis o inav. Inny fork cleanflighta nastawiony na używanie gpsa. Macie jakieś rady i wskazówki co do kontrolera dla 650 pod gpsa?
Obecnie sens ma jedynie Pixhawk i INAV, który dokładnie jak napisałeś - jest nastawiony już na użycie GPS. APM to już dziadek, a niestety brak innych FC, które miałyby tyle funkcji co Pixhawk (który notabene już też nie jest najnowszy). Z tych wszystkich INAV jest najnowszy, ale nie używałem więc się nie wypowiem jak dużo ma funkcji w stosunku do Pixa. Niestety rynek kontrolerów jest jakiś ubogi i jedyne co rozwija się teraz bardzo szybko to kontrolery do wyścigówek, które z oczywistych względów nie nadadzą się do większej maszyny, która potrzebuje mieć wspomaganie. Można jeszcze iść w stronę produktów DJI np. A3, który też ma ground station do obsługi lotów programowanych po waypointach, ale to już inna klasa sprzętu i inny koszt samego kontrolera.
UsuńTego się obawiałem. Przeważnie ktoś kto chce dużą maszynę np do filmowania, kupuje gotowego koptera i nie interesuje go kontroler lotu. A w wyścigówkach rządzi chyba betaflight. Oglądając regulatory w sklepach często spotyka się dopisek 'nie działa z apm/pixhawk'. Czasem nie jest to napisane, ale sprzedający w odpowiedzi na pytanie pisze wprost, że nie działa albo nie gwarantuje tego. Zatem będę się skłaniał ku inav - owi. Ale pamiętając moje przeboje z betaflight - em i pidowaniem go trochę się obawiam. Przy próbie wypidowania 250 na betaflight złamałem chyba ze cztery komplety śmigieł. A to przecież jego fork i może być podobnie.
OdpowiedzUsuńBetaflight to software, więc różne FC mogą działać z użyciem CleanFlight lub BetaFlight, ale obecnie BF to podstawa, bo CF nie jest już rozwijany z tego co wiem. Jest jeszcze RaceFlight rozwijany, ale to już nieco bardziej niszowa sprawa. Moim zdaniem małe FC z BF średnio się nadają do dużych maszyn, bo są projektowane pod racery, mają bardzo małe rozmiary i wagę żeby dało się je wetknąć na małą ramę. Nie widziałem jeszcze dużego koptera na takim małym FC, bo pewnie z pidowaniem jest ciężko jak napisałeś, ale próbuj. Powodzenia!:)
UsuńJeszcze będę się zastanawiał.
OdpowiedzUsuńSą jeszcze tańsze kontrolery dji naza. Ale obawiam się problemów z niemożnością latania w niektórych miejscach. Swego czasu czytałem jakiś tekst o wprowadzeniu do phantomów i innych od dji ograniczeń na loty. Kontroler miałby na podstawie odczytów gps pozwalać na lot albo nie. Czytałem też o problemach 'uaktualnij soft bo nie wystartujesz'. Szczerze mówiąc to mi się bardzo nie podoba. Jest też kontroler tarot zyx, ale niewiele o nim wiem i chyba nie jest specjalnie popularny.
Sam mam Naza V2 i w przypadku tego kontrolera nie musisz się obawiać o ograniczenia lotów w niektórych miejscach, bo on jeszcze jest od tego "wolny". Problem tylko taki, że on nie ma żadnego latania po punktach ani programowanych ścieżkach. Zaleta jednak niepodważalna jest taka, że moim zdaniem jest o wiele stabilniejszy do quadcopterów niż APM, o wiele prostszy w kalibracji i ustawieniach. Ostatnio kupiłem komplet z iOSD za jakieś 400zł. iOSD daje wszystkie potrzebne dane z lotu wprost na monitorze FPV i też nie trzeba cudować z minimOSD czy innym OSD do APM/PixHawka, po prostu się wpina i działa. Pod tym względem Naza wygrywa z APM, które sam osobiście bardzo lubiłem do lotów samolotów (bo Naza to tylko wielowirnikowce).
UsuńMoże na razie jest 'wolny' od ograniczeń, ale nie wiadomo czy któraś aktualizacja tego nie zmieni. Tak czy inaczej jest to zamknięty soft. Co dla mnie jest wadą. Bo w przypadku np mojego kontrolera spf3 mogę sobie zainstalować dowolny soft z nim zgodny, jeśli zainstalowany fabrycznie cleanflight mi nie odpowiada.
OdpowiedzUsuńAkurt Naza V2 jest uznawana za ostatni kontroler DJI, który pozostanie wolny od wszelkich ograniczeń, bo producent nie ma możliwości wymóc na nim aktualizacji, no bo w jaki sposób? Nie jest to kontroler, który wpina się do smartfona, nie ma żadnego innego połączenia z internetem. De facto nie trzeba go nawet przez asystenta na komputerze wpinać - raz skalibrowany będzie służył lata. Zresztą dlatego go kupiłem, choć na razie leży nieużywany ;) Wadą jest oczywiście brak otwartego softu, ale coś za coś niestety.
Usuń'Ostatnio kupiłem komplet z iOSD za jakieś 400zł' Mógłbyś podać namiar? Widziałem same moduły iosd w takiej cenie. A jakby komplet (kontroler, iosd, gps) był w takiej cenie to pewnie bym kupił. Szczególnie, że piszesz, że kontroler ma pozostać 'wolny'.
OdpowiedzUsuńNo niestety, nie jest to regularna cena, przeglądaj na bieżąco giełdy FPV/dronowe na Facebook'u. Ja tak kupiłem używaną Nazę v2 ze wszystkim łącznie z iOSD właśnie za grosze od gościa, który wyprzedawał wszystko i mu nie zależało zbytnio więc trzeba szukać okazji.
UsuńZima długa, to i zastanowię się porządnie. Jest jeszcze jedna możliwość. Zostawić apm i kupić regle z simonk. Szkoda pozbywać się apm, bo mam z nim dobre wspomnienia i nigdy mnie nie zawiódł. No i jest już skonfigurowany dla mojej maszyny. Zmiana regulatorów wiąże się tyko z ich skalibrowaniem i można latać. Natomiast regulatorów z simonk jest jak na lekarstwo. W polskich sklepach jest ich tylko tyle co w magazynach i raczej nie będzie nowych dostaw. Od Chińczyków można sprowadzić. Też nie jest tam tego dużo, ale póki są, to może warto kupić ze dwa zastawy na zapas. Tym sposobem zostałbym apm, dostałby nowe regulatory (pewnie ze 40A i do 6s) i wszystko byłoby po staremu:). A zanim maszyna będzie działać, to może pojawi się na rynku coś nowego.
OdpowiedzUsuńŚwietnie rozpisane wszystkie kwestie. Trzeba się zabierać do roboty.
OdpowiedzUsuńTen komentarz został usunięty przez autora.
OdpowiedzUsuńTen komentarz został usunięty przez autora.
OdpowiedzUsuńFajny poradnik
OdpowiedzUsuń________________
skysnap
Wiedzy i praktyki nigdy za wiele. Pozdrawiam.
OdpowiedzUsuńciekawe
OdpowiedzUsuńBardzo fajny wpis! Czekam na kolejne.
OdpowiedzUsuńRewelacyjny jest ten wpis
OdpowiedzUsuńSporo wiedzy ;)
OdpowiedzUsuńSporo wiesz ;)
OdpowiedzUsuńSame konkrety! To lubię :)
OdpowiedzUsuńJeśli szukasz idealnego monitoringu do swojego sklepu to koniecznie zerknij na stronę https://ivel.pl/ oni mają szeroką gamę produktów. Zestawy monitoringu, kamery czy rejestratory do monitoringu i wiele akcesoriów. To firma którą ja wam szczerze polecam.
OdpowiedzUsuńNic z tego nie zrozumiałem XD
OdpowiedzUsuńTen wpis to prawdziwa skarbnica wiedzy.
OdpowiedzUsuńInformacje zawarte w tym wpisie bardzo mnie zaciekawiły.
OdpowiedzUsuńTakie podpowiedzi są bardzo cenne. Świetny wpis.
OdpowiedzUsuńSpoko instruktaż, dzięki!
OdpowiedzUsuńSprawdźcie sobie stronę https://ironsky.pl , na której znajdziecie ofertę autoryzowanego sklepu internetowego Ironsky z najróżniejszymi dronami DJI oraz akcesoriami do nich. Jeżeli jesteście zainteresowani ich ofertą, to wszystkie informacje o niej oraz kontakt znajdziecie na stronie.
OdpowiedzUsuńFajny sprzęcior!
OdpowiedzUsuńŚwietny wpis
OdpowiedzUsuńCiekawe informacje
OdpowiedzUsuń